4 数值仿真
按线性模型所获得的最优控制律式(16),对于线性系统而言,在一个丁之后,液体回到静止状态,但由于充液系统是一个非线性系统,因此,线性模型的控制律是否仍然能使非线性系统满足约束条件(2),是需要进行实验验证的.通常在一个丁之后,液面波高和速度不再为零,因此,系统在下一个运动周期开始时存在初始能量,本文采用数值仿真实验考察:① 在一个丁的作用下,液面波高的响应曲线是否满足约束条件(2);② 考虑到非线性系统存在初始能量,考察在几个运动周期作用下液面波高的响应曲线是否满足约束条件(2),即灌注时间是否足以使初始能量序列不增加.本文采用ANsYs/FL0一TRAN 进行仿真实验,由于软件只能进行实体仿真,因此,将算例对象的特征长度放大10倍,则软件仿真时间t 与实时t的关系为

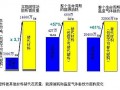
图5是在3个运动周期作用下的仿真波高响应曲线,显示了第2、3运动周期开始时的液体残余能量并没有导致约束条件(2)受到破坏.当运动时间步长丁。作为调制参数变动时,由式(16)所获得的线性控制律势必会影响液面波高.图6绘出了线性模型理论结果和非线性系统仿真结果的比较,显示了约束条件(2)选取的合理性.
5 结 论
(1)本文建立了二维矩形容器、圆柱形容器和一般直立旋转对称容器液体晃动线性控制系统的状态方程,修正了Grundelius所建立的二维矩形容器状态方程中的错误.
(2)采用能量最优目标函数,建立了线性系统的加速度控制律,得到了线性系统运动时间步长与液面波高、容器运动加速度之间的关系.
(3)采用线性系统的控制律,利用ANSYS/FLOTRAN软件对充液系统进行了仿真.仿真结果显示了一个运动周期后液体晃动存在残余能量,但本文显示残余能量并没有使液面超越波高约束限制.
(4)以运动时间步长作为调制参数,给出了液面波高的线性理论结果和非线性仿真结果的比较.结果显示当调制时间T≤0.4时,两者的误差大于10% ,且仿真波高的值大于理论波高的值.
(作者/彭 浩, 包光伟
上海交通大学船舶海洋与建筑工程学院)
上海交通大学学报